[拼音]:zaoshengyuan jianbie
[外文]:identification of noise source
在同时有多个噪声源或包含许多振动发声部件的复杂声源的情况下,为了确定各个声源或振动部件的声辐射性能(如辐射功率、频谱等)所进行的声源分析,并根据它们对总声场所起的作用加以分等。
在一个车间中,不同的机器发出不同的噪声。一部复杂的机器,例如织布机、冲压机、发动机,其中每一个部件都在振动而发出噪声。必须首先找出产生噪声最严重的机器或部件,确定辐射噪声的特性,才能有针对性地加以控制。因此噪声源鉴别是噪声控制的第一步。
噪声源鉴别的方法很多。常用的有以下几种。
分部开动法
在某一段时间内,只开动一台机器或只让机器中的某一个部件工作。用声级计测量相应的声级。较强声级所对应的机器或部件就是主要的噪声源。在能够分别开动机器的情况下,这是一种简易有效的方法。
选择机套法
用一个与机器表面各部分很贴近的机套将机器完全罩住。然后去掉套子的某一部分,让机器某一局部表面露出来。测量其辐射的声功率。对机器不同的局部表面重复这种试验并进行比较,便可以找出辐射噪声较强的部分。在频率低于200~300赫时,一般隔声机套的隔声量不够大。因此这种方法只适用于鉴别发出中频和高频噪声的那些机器。
表面振速法
大部分机器的噪声,来自机器中各个部件表面的振动。各振动面辐射的声功率W 可用下式计算:

式中ρ0为空气密度;c为声速;A为振动面的面积;<堸2>为该振动面振动速度的平方对时间和空间的平均值,可用加速度计对振动面进行测量,并对信号进行积分处理而得到振动速度V;σrad为声辐射效率,各种形状的梁和板的声辐射效率可以计算出来,也可以通过实验予以确定。
近场声强法
通过某一个面S的声功率W,可对声强I进行面积分而得到:

如果已知机器某一部件表面附近的声强,则可通过面积分求出它所辐射的声功率。测量近场声强的方法有两种:一种是测量表面的法向振动速度 un(t)和表面附近的声压p(t);声强

另一种是采用两个互相平行并靠近的传声器,从而避免在振动面上固定一个加速度计的麻烦。测量原理见图1。声强是通过两个传声器输出信号的互功率谱来计算。为了消除由于测量系统两个通道中信号的相对相位的移动而引起的误差,可将两个传声器及其连接的通道互换位置。设测得交换前两声压信号的互功率谱为G12,交换后两声压信号的互功率谱为G愇,则振动面附近的法向声强的频谱函数In(ω)可用下式计算:
In(ω)=Im{[G12·G愇]1/2}2ρω△r|H1||H2|式中Im表示取虚部;|H1|和|H2|分别为两个传声器系统的增益因数有效值;ω为角频率;ρ为空气密度;△r为两个传声器在振动面法线方向的距离。要求K△r<<1,K=ω/c为波数。从而△r的大小限制了声强测量的最高频率。求出In(ω)的傅里叶反变换,便可得到法向声强In(t)。在机器部件表面附近的许多点进行这样的测量,并通过上述求W 式的积分,即可得到该部件辐射的总声功率。用近场声强法进行噪声源鉴别,不必在特殊声学环境中(如消声室或混响室)进行。

时域分析法
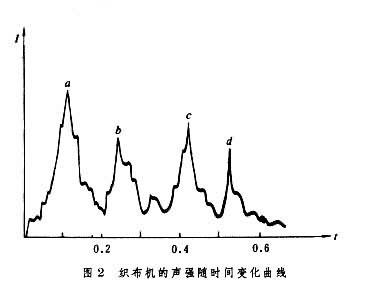
主要用于鉴别撞击噪声源。许多机器的噪声是由不同部件在不同时间里相互撞击产生的。这些不同的撞击声使得声压或声强随时间变化的曲线出现一系列峰值。时域分析就是通过一定的方法确定曲线上各个峰值与各部件间的撞击的对应关系。图2为一织布机的声强随时间变化的曲线。其中α、b、c、d相应于四个不同部位的撞击。声强曲线各个峰相应的一段曲线下的面积与该撞击的辐射声能存在比例关系,因而可以确定哪些是主要的撞击声源。
相关分析法
鉴别无规噪声源的一种重要方法,实质上也是一种时域分析。互相关函数表征两个时间函数的相似性,可以定量地描述它们之间相互依赖程度,从而揭示它们之间的因果关系。对于两个有限功率的时间函数f1(t)及 f2(t),其互相关函数φ21(τ)可用下式表示:

如同时存在多个声源,可用相关分析法确定每一声源对声场中某点声音影响的大小。图3表示用相关分析法对同时开动多台机器(A、B、C、D、E、F)的车间进行噪声源鉴别。先将各台机器的近场声信号分别与车间中某指定点的声信号送至相关器,求出它们之间的互相关函数;再将各组数据归一化,然后进行比较。对于指定点H来说,较强的互相关所对应的机器即为主要噪声源。因为该机器对 H点声音的影响较大。

频域分析法
如果各声源所产生的噪声是不同频率区域的窄带声,可采用窄带频谱分析的方法。用传声器测量声场的声压;用加速度计测量各噪声源的振动。对这些信号作傅里叶变换,并对所得的频谱进行分析。某个噪声源的振动信号频谱的主要部分和声信号频谱的主要部分位于相同的频率区域,或在某些频率都有峰值,即可认为这一噪声源为主要噪声源。如果各个声源的频谱特性相近,就要采用多重变量的统计方法,以求出各个声源相应的频率响应函数。
相干分析法
在声源鉴别中,用时间域的互相关函数方法得到的信息,也可用频率域的相干函数方法得到。假设一线性系统,其输入信号为x(t),输出信号为y(t);X(f)和Y(f)分别为其傅里叶变换,则相干函数的定义为:
式中Gxx=X(f)X*(f),为输入信号的功率谱;Gyy=Y(f)Y*(f),为输出信号的功率谱;Gyx=Y(f)X*(f),为输入与输出信号的互功率谱。在声源鉴别时,将所考虑的某声源的振动信号作为x(t),声场中所指定的测量点的总声压信号作为y(t)。如果只有这一个声源存在:
Y(f)=H(f)·X(f)式中H(f)为频率响应函数。当声源不止一个时:
Y(f)=H(f)·X(f)+Z(f)式中Z(f)为其他声源对测量点声压谱的影响。假设各声源之间是互不相干的,即Gxz=Gzx=0,则可推算得:

此式表明 γ嵤正好等于所考虑的声源在测量点产生的功率谱与测量点的总功率谱之比。相干函数的值越大,说明该声源对测量点声音的影响越大。分别求出各个声源与测量点信号之间的相干函数,通过比较,便可确定主要的噪声源。相干函数可用快速傅里叶分析系统求得。如果各声源之间并不相互独立,即相互间的相干函数不为零,则须要采用多重相干的方法。
声望远镜法
声望远镜是由许多传声器按一定排列方式组成的一个阵。有的在后面装有椭球面反射镜,共同组成一个具有方向性的传声器系统。各传声器的输出信号经放大后记录下来,由计算机分析处理,可求得被测物体的声源强度分布。图4为用声望远镜对一高速行进中的电力机车进行声源鉴别的示意图。机车上相距0.75米的七个不同高度所发出的声音,由反射镜分别聚焦于由下至上的七个传声器上。

- 参考书目
- M. J. Crocker, Manfred Zockel, Techniques for Noise Source Identification in Complex Machines,10th International Congress on Acoustics,B1~B10,1980.