[拼音]:kongzhong sanjiao celiang
[外文]:aerotriangulation
航空摄影测量中利用像片内在的几何特性,在室内加密控制点的方法。即利用连续摄取的具有一定重叠的航摄像片,依据少量野外控制点,以摄影测量方法建立同实地相应的航线模型或区域网模型(光学的或数字的),从而获取加密点的平面坐标和高程。主要用于测地形图。
工作简史
空中三角测量分为利用光学机械实现的模拟法和利用电子计算机实现的解析法两类。模拟法产生于 20世纪30年代初期(见O.von格鲁贝尔)。由于这种方法是在室内作业,节省了大量的野外控制测量工作,所以很快得到应用和推广。当时虽然也提出过有关解析法的基本理论,但由于计算工具和计算方法不够完善,所以只限于理论研究。直到40年代末,随着电子计算机应用范围的不断扩大,解析法才得到发展,并逐渐取代了模拟法。60年代以来,解析法摆脱了模拟法的传统概念,解算方法除仿照模拟法的航带法外,还有独立模型法和光线束法等典型方法。空中三角测量的范围也由单条航线扩展到几条航线连接的区域,形成区域网空中三角测量。它在运算中不仅可以处理偶然误差,而且也可以处理系统误差,有的程序还包括有自动剔除部分粗差的功能,有的还可进行摄影测量观测值和大地测量观测值及其他辅助数据的联合平差等。
方法
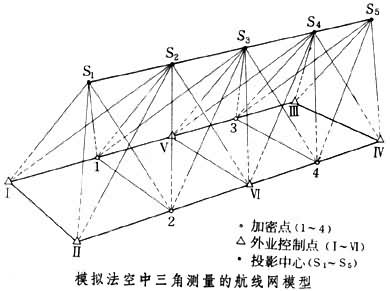
模拟法空中三角测量用光学机械的方法,在实现摄影过程的几何反转原理的基础上,借助立体测图仪进行空中三角测量。一般只限于在一条航线内进行。主要步骤是:把一条航线段的像片按顺序安置在测图仪的各投影器内,通过逐个像对的相对定向,建立单个立体模型。然后借助于相邻立体模型之间重叠部分的公共地物点和公共投影中心,把模型依次连接起来,构成航线网模型(见图)。最后把航线网模型作为一个整体进行绝对定向,使所建立的航线网模型同少量的外业控制点相符合。航线网模型中所有的点经绝对定向后,即可作为单个模型测图时的控制点。
航线网模型的绝对定向要求至少有 3个外业控制点。由于各种误差的存在会引起模型的变形,所以一般在工作中要求每条航线具备6个作业控制点,以便在绝对定向中用图解方法进行整体模型的变形改正。利用多倍投影测图仪进行空中三角测量时,像片须先经缩小;只有两个投影器的立体测图仪,如具有基线向内和向外安置,观察目镜系统左、右转换等功能,也可以用类似方法进行空中三角测量。
解析法空中三角测量根据像片上的像点坐标(或单元立体模型上点的坐标)同地面点坐标的解析关系或每两条同名光线共面的解析关系,构成摄影测量网的空中三角测量。建立摄影测量网和平差计算等工作都由计算机来完成。建网的方法有多种,最常用的是航带法、独立模型法和光线束法。这 3种方法既可以在一条航带上应用,称为单航带的解析空中三角测量,也可以将若干条航带连接成一个区域进行整体平差,称为区域网空中三角测量,或简称区域网平差。区域网平差不仅可以进一步减少野外实测控制点的工作量,而且有内部精度均匀的优点,所以应用最广。
(1)航带法区域网空中三角测量 这种方法基本上模仿模拟法空中三角测量建立单航带的过程,也就是通过计算相对定向元素和模型点坐标建立单个模型,利用相邻模型间公共连接点进行模型连接运算,以建立比例尺统一的航带立体模型。这样由各单条航线独立地建立各自的航带模型。每个航带模型单元要各自概略置平并统一在一个共同的坐标系中,最后进行整体平差运算。为此要对各航带列出各自的非线性改正公式(使用二次或三次多项式或二次正形变换公式),按最小二乘法准则统一平差计算,求出各条航带的非线性改正参数。计算过程中既要考虑使相邻航带间同名连接点的地面坐标相等,控制点的内业坐标同外业实测坐标相等,又要使各模型点坐标(此时作为观测值看待)改正数的平方和为最小,从而最后获得全区域网加密点的地面坐标。
(2)独立模型法区域网空中三角测量 首先由航带内各相邻的航摄像片构成单模型(或双模型或模型组)视为刚体单元,即在单元内不加任何改正的独立模型。各独立模型可以用解析法或用立体测图仪来建立。独立模型法区域网空中三角测量就是把这些独立模型的全部纳入到整体平差运算中。此时每个独立模型只作平移、旋转和缩放,把各个加密点和控制点的模型坐标作为观测值,使相邻独立模型的同名点的坐标相等,控制点的坐标同外业的实测坐标相等。在实践中常常把加密点的平面和高程分开解算,以减少计算机的存贮和计算工作量。
(3)光线束法区域网空中三角测量 以投影中心点、像点和相应的地面点三点共线为条件,以单张像片为解算单元,借助像片之间的公共点和野外控制点,把各张像片的光束连成一个区域进行整体平差,解算出加密点坐标的方法。其基本理论公式为中心投影的共线条件方程式(见解析摄影测量)。由每个像点的坐标观测值可以列出两个相应的误差方程式,按最小二乘准则平差,求出每张像片外方位元素的6个待定参数,即摄影站点的3个空间坐标和光线束旋转矩阵中3个独立的定向参数,从而得出各加密点的坐标。
以上3种方法中,光线束法理论公式是用实际观测的像点坐标为观测值列出误差方程式,所以平差的理论是严密的,加密的精度也应该最高。但在实施中应清除航摄资料本身存在的系统误差,否则光线束法的优越性就得不到发挥。航带法在理论上最不严密,但它在运算中有消除部分系统误差的功能,而且运算简单,对计算机内存容量的要求不高。
同模拟法比较,解析法精度高,速度快,没有模拟法的种种限制,而且对航摄机物镜畸变、摄影材料的变形、大气折光等物理因素所引起的像点误差,以及地球曲率的影响等都可以用计算的方法逐点加以改正,提高加密精度,从而可大量减少外业控制点的测量工作。解析空中三角测量方法不仅可用于测绘地形图的控制点内业加密,而且还可用于国民经济的其他方面,如铁路、公路的选线,高压输电线路的设计等。
仪器
包括量测和转刺像点的两类仪器。
量测仪器量测像点坐标的仪器主要有:立体坐标量测仪、精密立体坐标量测仪和单像坐标量测仪等。立体坐标量测仪和精密立体坐标量测仪均同时量测像对的两张像片,它们的结构采用X和Y两个严格垂直的精密导轨为主导轨,两个像盘可沿X主导轨作共同移动,两个观测物镜可沿 Y主导轨作共同移动。在主导轨上安有单独的x和y向短导轨,可使右像盘对左像盘做x向的相对移动,右观测物镜相对于左观测物镜做 y向相对移动。立体坐标量测仪和精密立体坐标量测仪可直接量测左像点的坐标x1和y1,左右视差p和上下视差q。左右视差 p=x1-x2是同名像点在左、右像片上的x坐标差,上下视差q=y1-y2是其 y坐标差。有的立体坐标量测仪对左右两像盘都有各自的x、y导轨,因而可同时量得左、右像片上某同名点的坐标值 x1、y1和x2、y2。精密立体坐标量测仪除了量测坐标的精度从 ±5微米提高到±1~±3微米的等级以外,由于采用增量脉冲计数方法,故一般都备有可以显示、打印、纸带穿孔或磁带记录等功能的自动坐标记录装置。
单像坐标量测仪只有一个像盘以及x和y导轨。配用不同的物镜和目镜,可用多种放大率进行观测。它的精度可达到±0.4微米。这类仪器也都附有自动坐标记录装置。为了提高仪器的量测精度,许多坐标量测仪在设计中使用了阿贝原理,亦即所量测的线段同量测的器具置于同一直线上的比长原理。
立体刺点仪空中三角测量中用于转刺像点的仪器。它是在立体观测下将所选用的像点在乳剂上刺出,或高精度地将像点从一张像片转刺于另一像片上的仪器,立体刺点仪的结构形式同立体坐标量测仪相似,但它没有精密的导轨和量测工具,而有精密的自动刺点装置。仪器的光路中装有光学缩放系统(如Zoom系统),使在比例尺相差很大的像片间也能进行刺点。光路中安装的旋像棱镜可使观察的影像旋转,构成反立体效应(旋转180°)或零立体效应(旋转90°或270°),以提高立体转点的精度和检查刺点是否正确。刺点器有不同的形式,有的仪器采用激光刺点器,有的仪器采用高频电加热的针刺点。(见彩图)
发展趋势
20世纪60年代后期,各类区域网空中三角测量方法开始在生产中应用,并在试验和比较各类平差方案,研究特大法方程组最经济有效的解法,以及处理作业中各种实际问题,发展了许多行之有效的计算程序。当前主要研究的是:
(1)自动剔除量测粗差。根据检验粗差的理论,适当增加多余观测,剔除粗差以提高观测值的可靠性。
(2)消除系统误差的影响。除致力于提高原始资料的质量外,也须在整体平差的解算中引入反映剩余系统误差的附加参数,进行统一解算的自检校平差。这种办法能有效地抵偿系统误差的影响,而又不增加外业控制点。
(3)联机空中三角测量。利用解析测图仪或立体坐标量测仪同计算机联机进行空中三角测量,在作业过程中实现人机对话,易于及时发现粗差,获取比较可靠的量测数据和提高作业速度。
(4)摄影测量数据和其他数据的联合平差。这对稳定和提高平差精度和减少外业控制点具有重要意义。可供利用的已知数据有空中测微高差仪和空中测高仪数据,以及地面的某些测量结果。如距离、高差、角度、静水面等高点等的测量结果,在区域网空中三角测量中,如把测微高差仪和测高仪记录的数据也作为观测值,列出相对高差条件方程和比例尺条件方程,考虑其间权的关系,再纳入到整体的空中三角测量平差运算中,可以改善空中三角测量的高程精度。